
Module AI.AI_Air_Patrol
AI - Models the process of A2G patrolling and engaging ground targets for airplanes and helicopters.
Author: FlightControl
Global(s)
Global AI_AIR_PATROL |
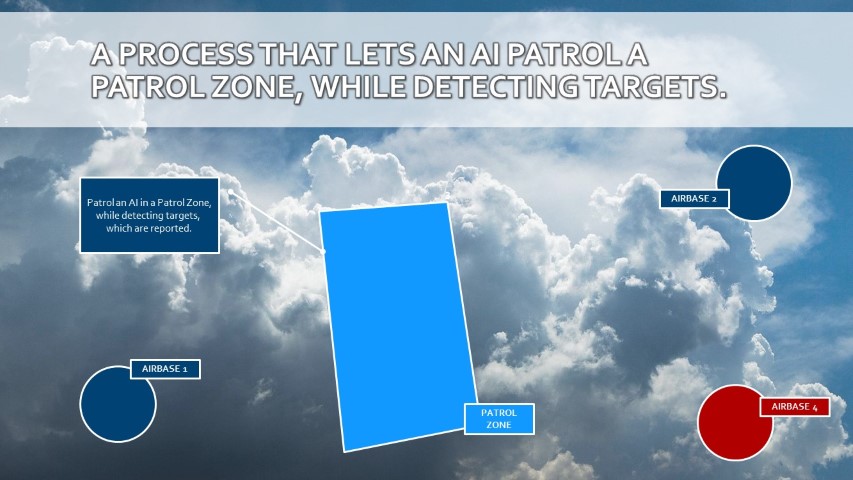
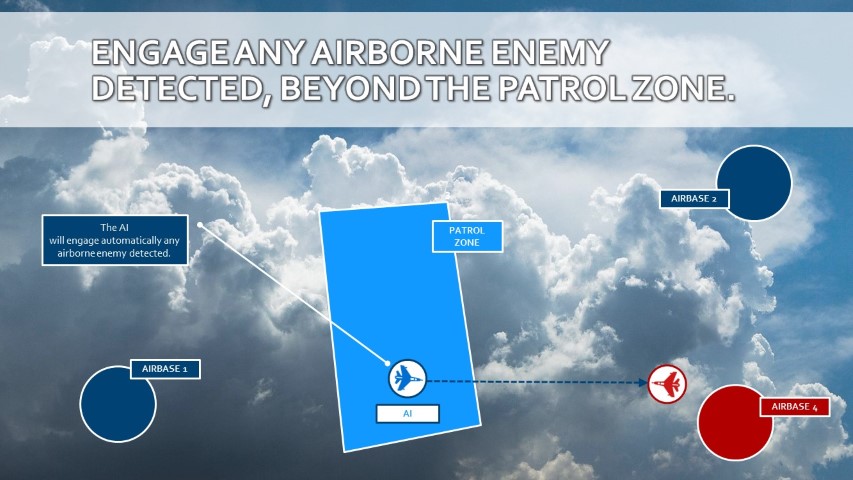
The AI_AIR_PATROL class implements the core functions to patrol a Core.Zone by an AI Wrapper.Group and automatically engage any airborne enemies that are within a certain range or within a certain zone. |
The AI_AIR_PATROL class implements the core functions to patrol a Core.Zone by an AI Wrapper.Group and automatically engage any airborne enemies that are within a certain range or within a certain zone.

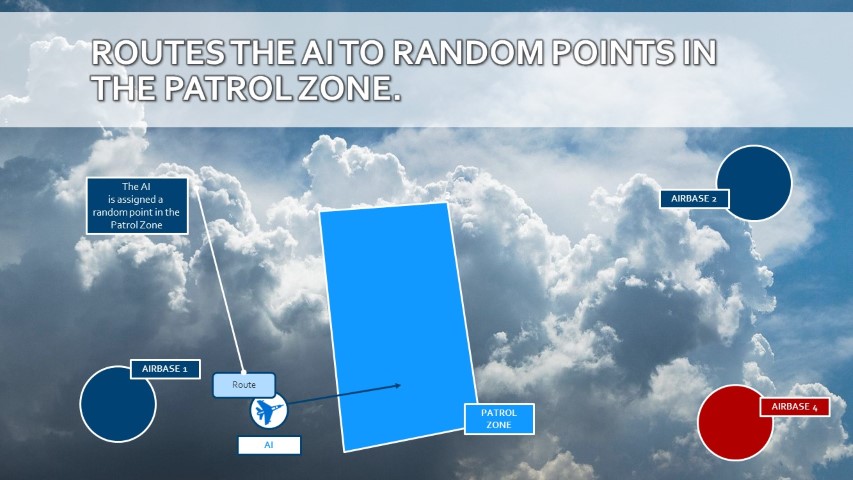
The AI_AIR_PATROL is assigned a Wrapper.Group and this must be done before the AI_AIR_PATROL process can be started using the Start event.

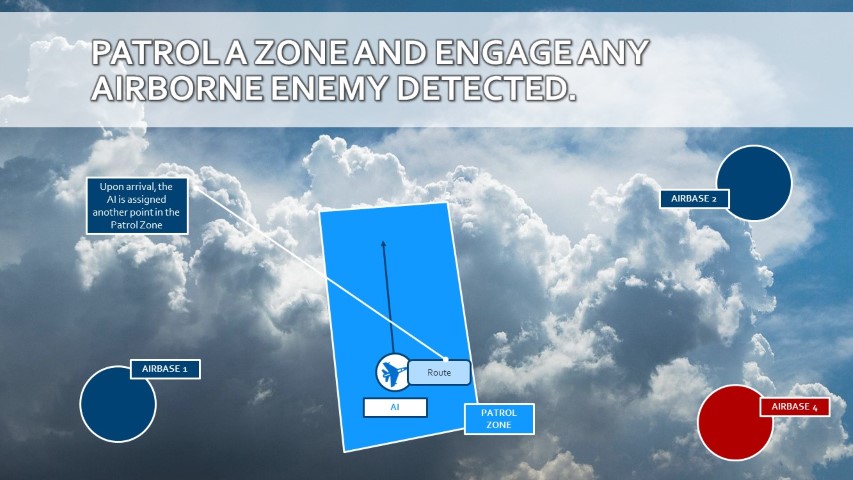
The AI will fly towards the random 3D point within the patrol zone, using a random speed within the given altitude and speed limits. Upon arrival at the 3D point, a new random 3D point will be selected within the patrol zone using the given limits.
This cycle will continue.
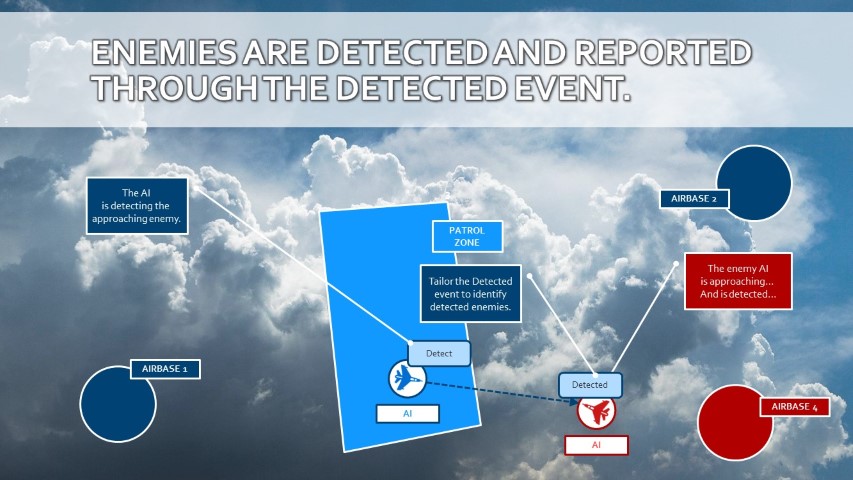
During the patrol, the AI will detect enemy targets, which are reported through the Detected event.
When enemies are detected, the AI will automatically engage the enemy.
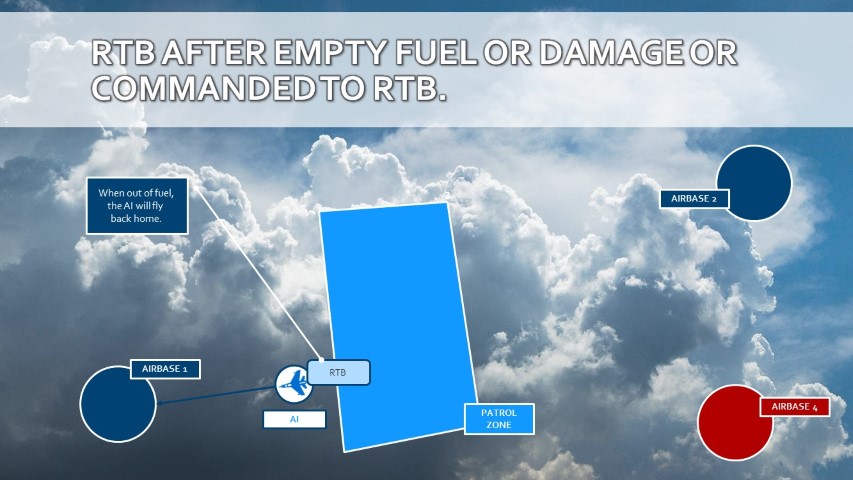
Until a fuel or damage threshold has been reached by the AI, or when the AI is commanded to RTB. When the fuel threshold has been reached, the airplane will fly towards the nearest friendly airbase and will land.
1. AI_AIR_PATROL constructor
- AI_AIR_PATROL.New(): Creates a new AI_AIR_PATROL object.
2. AI_AIR_PATROL is a FSM
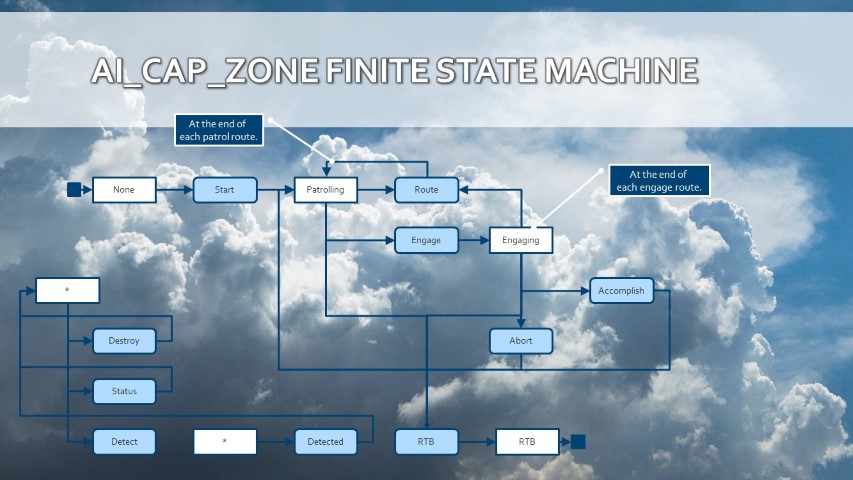
2.1 AI_AIR_PATROL States
- None ( Group ): The process is not started yet.
- Patrolling ( Group ): The AI is patrolling the Patrol Zone.
- Engaging ( Group ): The AI is engaging the bogeys.
- Returning ( Group ): The AI is returning to Base..
2.2 AI_AIR_PATROL Events
- **AI.AI_Patrol#AI_PATROL_ZONE.Start**: Start the process.
- **AI.AI_Patrol#AI_PATROL_ZONE.PatrolRoute**: Route the AI to a new random 3D point within the Patrol Zone.
- **AI_AIR_PATROL.Engage**: Let the AI engage the bogeys.
- **AI_AIR_PATROL.Abort**: Aborts the engagement and return patrolling in the patrol zone.
- **AI.AI_Patrol#AI_PATROL_ZONE.RTB**: Route the AI to the home base.
- **AI.AI_Patrol#AI_PATROL_ZONE.Detect**: The AI is detecting targets.
- **AI.AI_Patrol#AI_PATROL_ZONE.Detected**: The AI has detected new targets.
- **AI_AIR_PATROL.Destroy**: The AI has destroyed a bogey Wrapper.Unit.
- **AI_AIR_PATROL.Destroyed**: The AI has destroyed all bogeys Wrapper.Units assigned in the CAS task.
- Status ( Group ): The AI is checking status (fuel and damage). When the thresholds have been reached, the AI will RTB.
3. Set the Range of Engagement
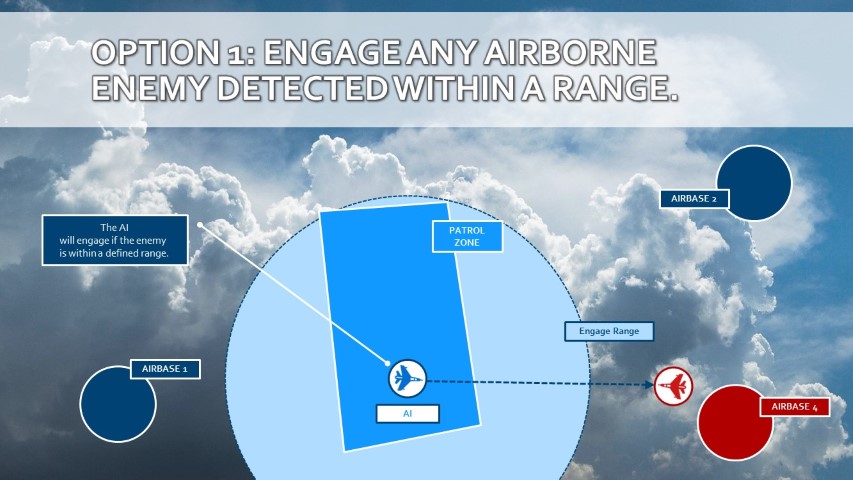
An optional range can be set in meters, that will define when the AI will engage with the detected airborne enemy targets. The range can be beyond or smaller than the range of the Patrol Zone. The range is applied at the position of the AI. Use the method AI_AIR_PATROL.SetEngageRange() to define that range.
Developer Note
Note while this class still works, it is no longer supported as the original author stopped active development of MOOSE Therefore, this class is considered to be deprecated
Type(s)
| Fields and Methods inherited from AI_AIR_PATROL | Description |
|---|---|
|
Creates a new AI_AIR_PATROL object |
|
|
OnAfter Transition Handler for Event Patrol. |
|
|
OnAfter Transition Handler for Event PatrolRoute. |
|
|
OnBefore Transition Handler for Event Patrol. |
|
AI_AIR_PATROL:OnBeforePatrolRoute(AIPatrol, From, Event, To) |
OnBefore Transition Handler for Event PatrolRoute. |
|
OnEnter Transition Handler for State Patrolling. |
|
|
OnLeave Transition Handler for State Patrolling. |
|
|
Synchronous Event Trigger for Event Patrol. |
|
|
Synchronous Event Trigger for Event PatrolRoute. |
|
|
Resumes the AIPatrol |
|
|
Set the Engage Range when the AI will engage with airborne enemies. |
|
|
Set race track parameters. |
|
|
Asynchronous Event Trigger for Event Patrol. |
|
|
Asynchronous Event Trigger for Event PatrolRoute. |
|
|
This static method is called from the route path within the last task at the last waypoint of the AIPatrol. |
|
|
Defines a new patrol route using the AI.AI_Patrol#AI_PATROL_ZONE parameters and settings. |
|
|
Defines a new patrol route using the AI.AI_Patrol#AI_PATROL_ZONE parameters and settings. |
|
Field(s)
Function(s)
Creates a new AI_AIR_PATROL object
Defined in:
AI_AIR_PATROL
Parameters:
AI.AI_Air#AI_AIR AI_Air
The AI_AIR FSM.
Wrapper.Group#GROUP AIGroup
The AI group.
Core.Zone#ZONE_BASE PatrolZone
The Core.Zone where the patrol needs to be executed.
DCS#Altitude PatrolFloorAltitude
(optional, default = 1000m ) The lowest altitude in meters where to execute the patrol.
DCS#Altitude PatrolCeilingAltitude
(optional, default = 1500m ) The highest altitude in meters where to execute the patrol.
DCS#Speed PatrolMinSpeed
(optional, default = 50% of max speed) The minimum speed of the Wrapper.Group in km/h.
DCS#Speed PatrolMaxSpeed
(optional, default = 75% of max speed) The maximum speed of the Wrapper.Group in km/h.
DCS#AltitudeType PatrolAltType
The altitude type ("RADIO"=="AGL", "BARO"=="ASL"). Defaults to RADIO.
Return value:
OnAfter Transition Handler for Event Patrol.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
OnAfter Transition Handler for Event PatrolRoute.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
OnBefore Transition Handler for Event Patrol.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
Return value:
#boolean:
Return false to cancel Transition.
OnBefore Transition Handler for Event PatrolRoute.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
Return value:
#boolean:
Return false to cancel Transition.
OnEnter Transition Handler for State Patrolling.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
OnLeave Transition Handler for State Patrolling.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
Return value:
#boolean:
Return false to cancel Transition.
Synchronous Event Trigger for Event PatrolRoute.
Defined in:
AI_AIR_PATROL
Resumes the AIPatrol
Set the Engage Range when the AI will engage with airborne enemies.
Defined in:
AI_AIR_PATROL
Parameter:
#number EngageRange
The Engage Range.
Return value:
self
Set race track parameters.
CAP flights will perform race track patterns rather than randomly patrolling the zone.
Defined in:
AI_AIR_PATROL
Parameters:
#number LegMin
Min Length of the race track leg in meters. Default 10,000 m.
#number LegMax
Max length of the race track leg in meters. Default 15,000 m.
#number HeadingMin
Min heading of the race track in degrees. Default 0 deg, i.e. from South to North.
#number HeadingMax
Max heading of the race track in degrees. Default 180 deg, i.e. from South to North.
#number DurationMin
(Optional) Min duration before switching the orbit position. Default is keep same orbit until RTB or engage.
#number DurationMax
(Optional) Max duration before switching the orbit position. Default is keep same orbit until RTB or engage.
#table CapCoordinates
Table of coordinates of first race track point. Second point is determined by leg length and heading.
Return value:
self
Asynchronous Event Trigger for Event Patrol.
Defined in:
AI_AIR_PATROL
Parameter:
#number Delay
The delay in seconds.
Asynchronous Event Trigger for Event PatrolRoute.
Defined in:
AI_AIR_PATROL
Parameter:
#number Delay
The delay in seconds.
This static method is called from the route path within the last task at the last waypoint of the AIPatrol.
Note that this method is required, as triggers the next route when patrolling for the AIPatrol.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The AI group.
#AI_AIR_PATROL Fsm
The FSM.
Defines a new patrol route using the AI.AI_Patrol#AI_PATROL_ZONE parameters and settings.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group Object managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
Return value:
self
Defines a new patrol route using the AI.AI_Patrol#AI_PATROL_ZONE parameters and settings.
Defined in:
AI_AIR_PATROL
Parameters:
Wrapper.Group#GROUP AIPatrol
The Group managed by the FSM.
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.