
Module Tasking.Task_A2G_Dispatcher
Tasking - Dynamically allocates A2G tasks to human players, based on detected ground targets through reconnaissance.
Features:
- Dynamically assign tasks to human players based on detected targets.
- Dynamically change the tasks as the tactical situation evolves during the mission.
- Dynamically assign (CAS) Close Air Support tasks for human players.
- Dynamically assign (BAI) Battlefield Air Interdiction tasks for human players.
- Dynamically assign (SEAD) Suppression of Enemy Air Defense tasks for human players to eliminate G2A missile threats.
- Define and use an EWR (Early Warning Radar) network.
- Define different ranges to engage upon intruders.
- Keep task achievements.
- Score task achievements.
Author: FlightControl
Contributions:
Global(s)
Global TASK_A2G_DISPATCHER |
Orchestrates dynamic A2G Task Dispatching based on the detection results of a linked Functional.Detection object. |
Orchestrates dynamic A2G Task Dispatching based on the detection results of a linked Functional.Detection object.

It uses the Tasking System within the MOOSE framework, which is a multi-player Tasking Orchestration system. It provides a truly dynamic battle environment for pilots and ground commanders to engage upon, in a true co-operation environment wherein Multiple Teams will collaborate in Missions to achieve a common Mission Goal.
The A2G dispatcher will dispatch the A2G Tasks to a defined Core.Set of Wrapper.Groups that will be manned by Players.
We call this the AttackSet of the A2G dispatcher. So, the Players are seated in the Wrapper.Clients of the Wrapper.Group Core.Set.
Depending on the actions of the enemy, preventive tasks are dispatched to the players to orchestrate the engagement in a true co-operation. The detection object will group the detected targets by its grouping method, and integrates a Core.Set of Wrapper.Groups that are Recce vehicles or air units. We call this the RecceSet of the A2G dispatcher.
Depending on the current detected tactical situation, different task types will be dispatched to the Players seated in the AttackSet.. There are currently 3 Task Types implemented in the TASK_A2G_DISPATCHER:
- SEAD Task: Dispatched when there are ground based Radar Emitters detected within an area.
- CAS Task: Dispatched when there are no ground based Radar Emitters within the area, but there are friendly ground Units within 6 km from the enemy.
- BAI Task: Dispatched when there are no ground based Radar Emitters within the area, and there aren't friendly ground Units within 6 km from the enemy.
0. Tactical Situations
This chapters provides some insights in the tactical situations when certain Task Types are created. The Task Types are depending on the enemy positions that were detected, and the current location of friendly units.
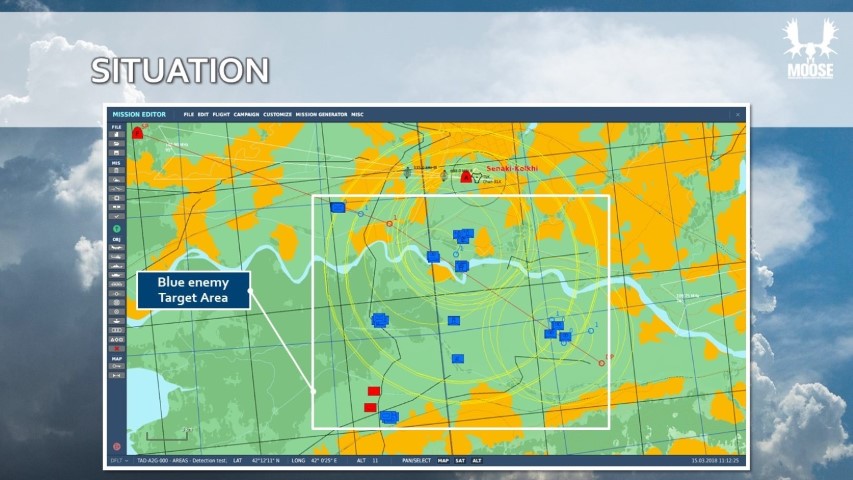
In the demonstration mission [TAD-A2G-000 - AREAS - Detection test], the tactical situation is a demonstration how the A2G detection works. This example will be taken further in the explanation in the following chapters.
The red coalition are the players, the blue coalition is the enemy.
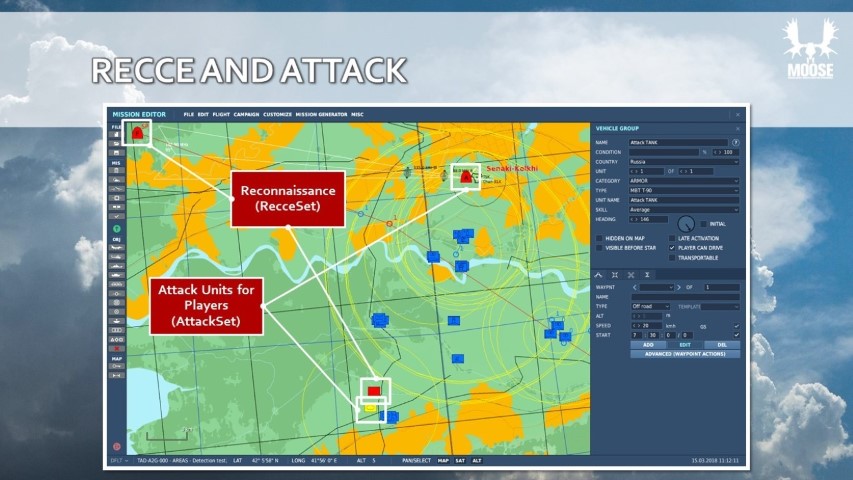
Red reconnaissance vehicles and airborne units are detecting the targets.
We call this the RecceSet as explained above, which is a Set of Groups that
have a group name starting with Recce (configured in the mission script).
Red attack units are responsible for executing the mission for the command center.
We call this the AttackSet, which is a Set of Groups with a group name starting with Attack (configured in the mission script).
These units are setup in this demonstration mission to be ground vehicles and airplanes.
For demonstration purposes, the attack airplane is stationed on the ground to explain
the messages and the menus properly.
Further test missions demonstrate the A2G task dispatcher from within air.
Depending upon the detection results, the A2G dispatcher will create different tasks.
0.1. SEAD Task
A SEAD Task is dispatched when there are ground based Radar Emitters detected within an area.
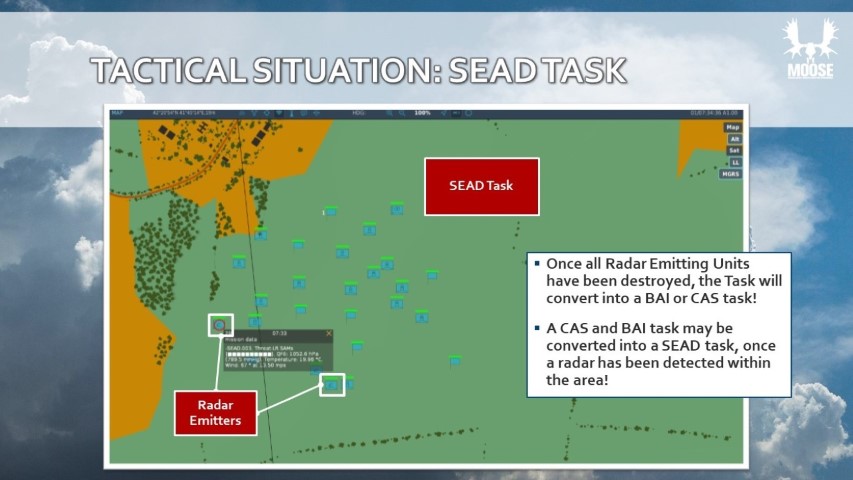
- Once all Radar Emitting Units have been destroyed, the Task will convert into a BAI or CAS task!
- A CAS and BAI task may be converted into a SEAD task, once a radar has been detected within the area!
0.2. CAS Task
A CAS Task is dispatched when there are no ground based Radar Emitters within the area, but there are friendly ground Units within 6 km from the enemy.
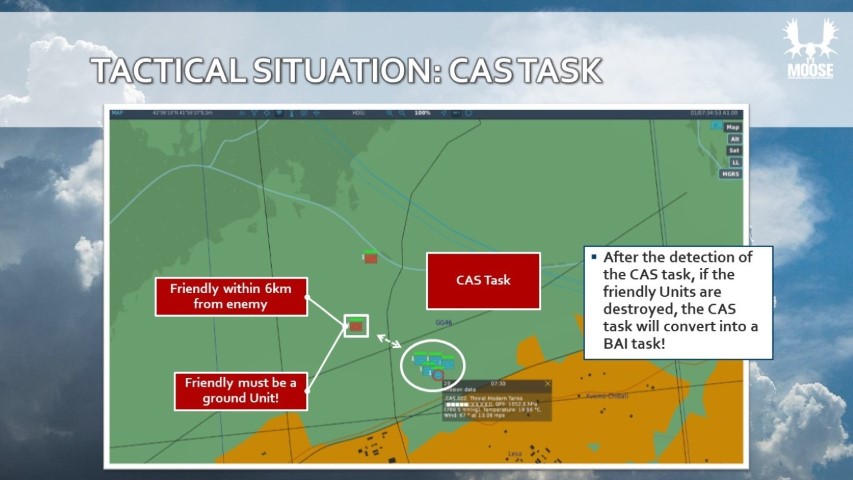
- After the detection of the CAS task, if the friendly Units are destroyed, the CAS task will convert into a BAI task!
- Only ground Units are taken into account. Airborne units are ships are not considered friendlies that require Close Air Support.
0.3. BAI Task
A BAI Task is dispatched when there are no ground based Radar Emitters within the area, and there aren't friendly ground Units within 6 km from the enemy.
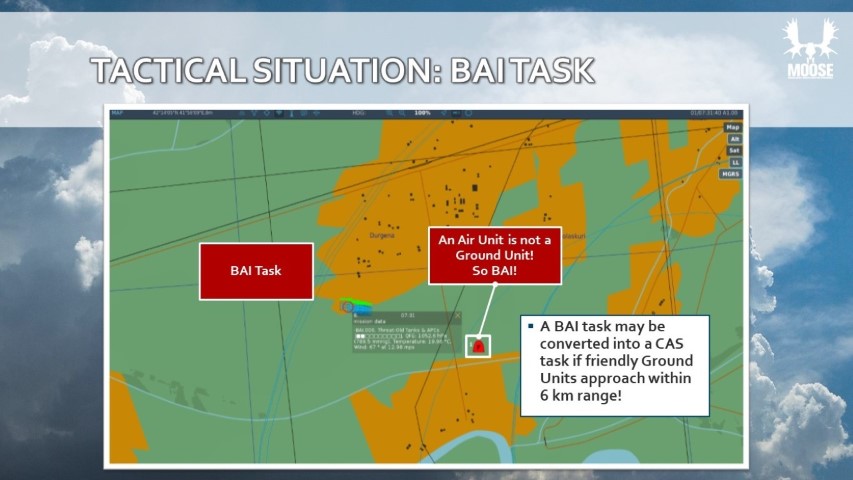
- A BAI task may be converted into a CAS task if friendly Ground Units approach within 6 km range!
1. Player Experience
The A2G dispatcher is residing under a Tasking.CommandCenter, which is orchestrating a Tasking.Mission. As a result, you'll find for DCS World missions that implement the A2G dispatcher a Command Center Menu and under this one or more Mission Menus.
For example, if there are 2 Command Centers (CC). Each CC is controlling a couple of Missions, the Radio Menu Structure could look like this:
Radio MENU Structure (F10. Other)
F1. Command Center [Gori]
F1. Mission "Alpha (Primary)"
F2. Mission "Beta (Secondary)"
F3. Mission "Gamma (Tactical)"
F1. Command Center [Lima]
F1. Mission "Overlord (High)"
Command Center [Gori] is controlling Mission "Alpha", "Beta", "Gamma". Alpha is the Primary mission, Beta the Secondary and there is a Tactical mission Gamma. Command Center [Lima] is controlling Missions "Overlord", which needs to be executed with High priority.
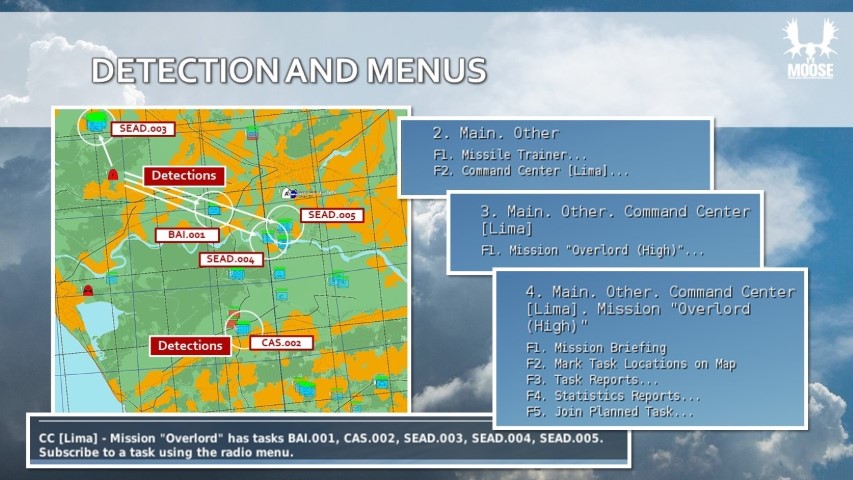
1.1. Mission Menu (Under the Command Center Menu)
The Mission Menu controls the information of the mission, including the:
- Mission Briefing: A briefing of the Mission in text, which will be shown as a message.
- Mark Task Locations: A summary of each Task will be shown on the map as a marker.
- Create Task Reports: A menu to create various reports of the current tasks dispatched by the A2G dispatcher.
- Create Mission Reports: A menu to create various reports on the current mission.
For CC [Lima], Mission "Overlord", the menu structure could look like this:
Radio MENU Structure (F10. Other)
F1. Command Center [Lima]
F1. Mission "Overlord"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
1.1.1. Mission Briefing Menu
The Mission Briefing Menu will show in text a summary description of the overall mission objectives and expectations. Note that the Mission Briefing is not the briefing of a specific task, but rather provides an overall strategy and tactical situation, and explains the mission goals.
1.1.2. Mark Task Locations Menu
The Mark Task Locations Menu will mark the location indications of the Tasks on the map, if this intelligence is known by the Command Center. For A2G tasks this information will always be know, but it can be that for other tasks a location intelligence will be less relevant. Note that each Planned task and each Engaged task will be marked. Completed, Failed and Cancelled tasks are not marked. Depending on the task type, a summary information is shown to bring to the player the relevant information for situational awareness.
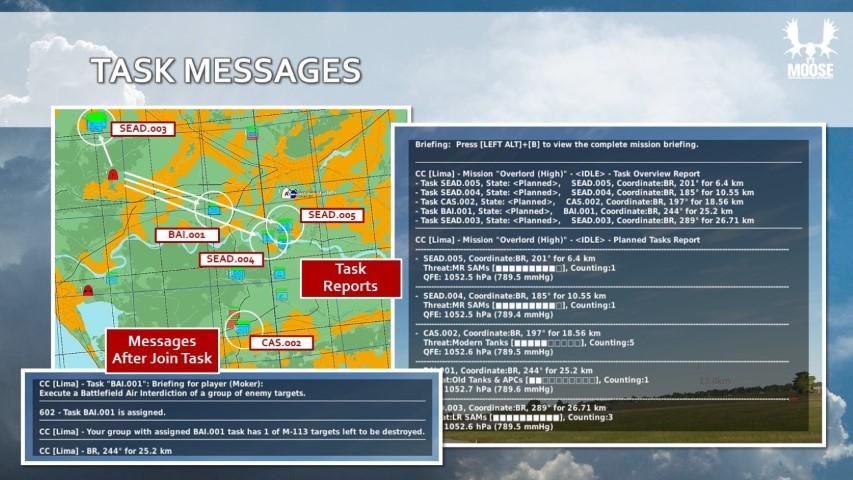
1.1.3. Task Reports Menu
The Task Reports Menu is a sub menu, that allows to create various reports:
- Tasks Summary: This report will list all the Tasks that are or were active within the mission, indicating its status.
- Planned Tasks: This report will list all the Tasks that are in status Planned, which are Tasks not assigned to any player, and are ready to be executed.
- Assigned Tasks: This report will list all the Tasks that are in status Assigned, which are Tasks assigned to (a) player(s) and are currently executed.
- Successful Tasks: This report will list all the Tasks that are in status Success, which are Tasks executed by (a) player(s) and are completed successfully.
- Failed Tasks: This report will list all the Tasks that are in status Success, which are Tasks executed by (a) player(s) and that have failed.
The information shown of the tasks will vary according the underlying task type, but are self explanatory.
For CC [Gori], Mission "Alpha", the Task Reports menu structure could look like this:
Radio MENU Structure (F10. Other)
F1. Command Center [Gori]
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F1. Tasks Summary
F2. Planned Tasks
F3. Assigned Tasks
F4. Successful Tasks
F5. Failed Tasks
F4. Mission Reports
Note that these reports provide an "overview" of the tasks. Detailed information of the task can be retrieved using the Detailed Report on the Task Menu. (See later).
1.1.4. Mission Reports Menu
The Mission Reports Menu is a sub menu, that provides options to retrieve further information on the current Mission:
- Report Mission Progress: Shows the progress of the current Mission. Each Task has a % of completion.
- Report Players per Task: Show which players are engaged on which Task within the Mission.
For CC |Gori|, Mission "Alpha", the Mission Reports menu structure could look like this:
Radio MENU Structure (F10. Other)
F1. Command Center [Gori]
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
F1. Report Mission Progress
F2. Report Players per Task
1.2. Task Management Menus
Very important to remember is: Multiple Players can be assigned to the same Task, but from the player perspective, the Player can only be assigned to one Task per Mission at the same time! Consider this like the two major modes in which a player can be in. He can be free of tasks or he can be assigned to a Task. Depending on whether a Task has been Planned or Assigned to a Player (Group), the Mission Menu will contain extra Menus to control specific Tasks.
1.2.1. Join a Planned Task
If the Player has not yet been assigned to a Task within the Mission, the Mission Menu will contain additionally a:
- Join Planned Task Menu: This menu structure allows the player to join a planned task (a Task with status Planned).
For CC |Gori|, Mission "Alpha", the menu structure could look like this:
Radio MENU Structure (F10. Other)
F1. Command Center [Gori]
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
F5. Join Planned Task
The F5. Join Planned Task allows the player to join a Planned Task and take an engagement in the running Mission.
1.2.2. Manage an Assigned Task
If the Player has been assigned to one Task within the Mission, the Mission Menu will contain an extra:
- Assigned Task TaskName Menu: This menu structure allows the player to take actions on the currently engaged task.
In this example, the Group currently seated by the player is not assigned yet to a Task. The Player has the option to assign itself to a Planned Task using menu option F5 under the Mission Menu "Alpha".
This would be an example menu structure, for CC |Gori|, Mission "Alpha", when a player would have joined Task CAS.001:
Radio MENU Structure (F10. Other)
F1. Command Center [Gori]
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
F5. Assigned Task CAS.001
The F5. Assigned Task TaskName allows the player to control the current Assigned Task and take further actions.
1.3. Join Planned Task Menu
The Join Planned Task Menu contains the different Planned A2G Tasks in a structured Menu Hierarchy. The Menu Hierarchy is structuring the Tasks per Task Type, and then by Task Name (ID).
For example, for CC [Gori], Mission "Alpha", if a Mission "ALpha" contains 5 Planned Tasks, which would be:
- 2 CAS Tasks
- 1 BAI Task
- 2 SEAD Tasks
the Join Planned Task Menu Hierarchy could look like this:
Radio MENU Structure (F10. Other)
F1. Command Center [Gori]
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
F5. Join Planned Task
F2. BAI
F1. BAI.001
F1. CAS
F1. CAS.002
F3. SEAD
F1. SEAD.003
F2. SEAD.004
F3. SEAD.005
An example from within a running simulation:

Each Task Type Menu would have a list of the Task Menus underneath.
Each Task Menu (eg. CAS.001) has a detailed Task Menu structure to control the specific task!
1.3.1. Planned Task Menu
Each Planned Task Menu will allow for the following actions:
- Report Task Details: Provides a detailed report on the Planned Task.
- Mark Task Location on Map: Mark the approximate location of the Task on the Map, if relevant.
- Join Task: Join the Task. This is THE menu option to let a Player join the Task, and to engage within the Mission.
The Join Planned Task Menu could look like this for for CC |Gori|, Mission "Alpha":
Radio MENU Structure (F10. Other)
F1. Command Center |Gori|
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
F5. Join Planned Task
F1. CAS
F1. CAS.001
F1. Report Task Details
F2. Mark Task Location on Map
F3. Join Task
The Join Task is THE menu option to let a Player join the Task, and to engage within the Mission.
1.4. Assigned Task Menu
The Assigned Task Menu allows to control the current assigned task within the Mission.
Depending on the Type of Task, the following menu options will be available:
- Report Task Details: Provides a detailed report on the Planned Task.
- Mark Task Location on Map: Mark the approximate location of the Task on the Map, if relevant.
- Abort Task: Abort the current assigned Task: This menu option lets the player abort the Task.
For example, for CC |Gori|, Mission "Alpha", the Assigned Menu could be:
F1. Command Center |Gori|
F1. Mission "Alpha"
F1. Mission Briefing
F2. Mark Task Locations on Map
F3. Task Reports
F4. Mission Reports
F5. Assigned Task
F1. Report Task Details
F2. Mark Task Location on Map
F3. Abort Task
Task abortion will result in the Task to be Cancelled, and the Task may be Replanned. However, this will depend on the setup of each Mission.
1.5. Messages
During game play, different messages are displayed. These messages provide an update of the achievements made, and the state wherein the task is.
The various reports can be used also to retrieve the current status of the mission and its tasks.
The Core.Settings menu provides additional options to control the timing of the messages. There are:
- Status messages, which are quick status updates. The settings menu allows to switch off these messages.
- Information messages, which are shown a bit longer, as they contain important information.
- Summary reports, which are quick reports showing a high level summary.
- Overview reports, which are providing the essential information. It provides an overview of a greater thing, and may take a bit of time to read.
- Detailed reports, which provide with very detailed information. It takes a bit longer to read those reports, so the display of those could be a bit longer.
2. TASK_A2G_DISPATCHER constructor
The TASK_A2G_DISPATCHER.New() method creates a new TASK_A2G_DISPATCHER instance.
3. Usage
To use the TASK_A2G_DISPATCHER class, you need:
- A Tasking.CommandCenter object. The master communication channel.
- A Tasking.Mission object. Each task belongs to a Mission.
- A Functional.Detection object. There are several detection grouping methods to choose from.
- A Tasking.Task_A2G_Dispatcher object. The master A2G task dispatcher.
- A Core.Set of Wrapper.Group objects that will detect the enemy, the RecceSet. This is attached to the Functional.Detection object.
- A Core.Set of Wrapper.Group objects that will attack the enemy, the AttackSet. This is attached to the Tasking.Task_A2G_Dispatcher object.
Below an example mission declaration that is defines a Task A2G Dispatcher object.
-- Declare the Command Center
local HQ = GROUP
:FindByName( "HQ", "Bravo HQ" )
local CommandCenter = COMMANDCENTER
:New( HQ, "Lima" )
-- Declare the Mission for the Command Center.
local Mission = MISSION
:New( CommandCenter, "Overlord", "High", "Attack Detect Mission Briefing", coalition.side.RED )
-- Define the RecceSet that will detect the enemy.
local RecceSet = SET_GROUP
:New()
:FilterPrefixes( "FAC" )
:FilterCoalitions("red")
:FilterStart()
-- Setup the detection. We use DETECTION_AREAS to detect and group the enemies within areas of 3 km radius.
local DetectionAreas = DETECTION_AREAS
:New( RecceSet, 3000 ) -- The RecceSet will detect the enemies.
-- Setup the AttackSet, which is a SET_GROUP.
-- The SET_GROUP is a dynamic collection of GROUP objects.
local AttackSet = SET_GROUP
:New() -- Create the SET_GROUP object.
:FilterCoalitions( "red" ) -- Only incorporate the RED coalitions.
:FilterPrefixes( "Attack" ) -- Only incorporate groups that start with the name Attack.
:FilterStart() -- Enable the dynamic filtering. From this moment the AttackSet will contain all groups that are red and start with the name Attack.
-- Now we have everything to setup the main A2G TaskDispatcher.
TaskDispatcher = TASK_A2G_DISPATCHER
:New( Mission, AttackSet, DetectionAreas ) -- We assign the TaskDispatcher under Mission. The AttackSet will engage the enemy and will receive the dispatched Tasks. The DetectionAreas will report any detected enemies to the TaskDispatcher.
Developer Note
Note while this class still works, it is no longer supported as the original author stopped active development of MOOSE Therefore, this class is considered to be deprecated
Type(s)
| Fields and Methods inherited from TASK_A2G_DISPATCHER | Description |
|---|---|
|
The DETECTION_BASE object that is used to report the detected objects. |
|
TASK_A2G_DISPATCHER:EvaluateBAI(DetectedItem, FriendlyCoalition) |
Creates a BAI task when there are targets for it. |
|
Creates a CAS task when there are targets for it. |
|
|
Evaluates the removal of the Task from the Mission. |
|
|
Creates a SEAD task when there are targets for it. |
|
|
TASK_A2G_DISPATCHER constructor. |
|
TASK_A2G_DISPATCHER:OnAfterAssign(From, Event, To, Task, TaskUnit, PlayerName) |
OnAfter Transition Handler for Event Assign. |
|
Assigns tasks in relation to the detected items to the Core.Set#SET_GROUP. |
|
|
The groups to which the FAC will report to. |
|
|
Set flashing player messages on or off |
| Fields and Methods inherited from DETECTION_MANAGER | Description |
|---|---|
|
Get the command center to communicate actions to the players. |
|
|
Get the reporting message display time. |
|
|
Send an information message to the players reporting to the command center. |
|
|
FAC constructor. |
|
|
Aborted Handler OnAfter for DETECTION_MANAGER |
|
|
Cancelled Handler OnAfter for DETECTION_MANAGER |
|
|
Failed Handler OnAfter for DETECTION_MANAGER |
|
|
Start Handler OnAfter for DETECTION_MANAGER |
|
|
Stop Handler OnAfter for DETECTION_MANAGER |
|
|
Success Handler OnAfter for DETECTION_MANAGER |
|
|
Start Handler OnBefore for DETECTION_MANAGER |
|
|
Stop Handler OnBefore for DETECTION_MANAGER |
|
|
Reports the detected items to the Core.Set#SET_GROUP. |
|
|
Set a command center to communicate actions to the players reporting to the command center. |
|
TASK_A2G_DISPATCHER:SetRefreshTimeInterval(RefreshTimeInterval) |
Set the reporting time interval. |
|
Set the reporting message display time. |
|
TASK_A2G_DISPATCHER:SetTacticalMenu(DispatcherMainMenuText, DispatcherMenuText) |
Set a command center to communicate actions to the players reporting to the command center. |
|
Start Trigger for DETECTION_MANAGER |
|
|
Stop Trigger for DETECTION_MANAGER |
|
|
Start Asynchronous Trigger for DETECTION_MANAGER |
|
|
Stop Asynchronous Trigger for DETECTION_MANAGER |
|
TASK_A2G_DISPATCHER class.
Field(s)
The DETECTION_BASE object that is used to report the detected objects.
Function(s)
Creates a BAI task when there are targets for it.
Defined in:
TASK_A2G_DISPATCHER
Parameters:
Functional.Detection#DETECTION_AREAS.DetectedItem DetectedItem
FriendlyCoalition
Return values:
Creates a CAS task when there are targets for it.
Defined in:
TASK_A2G_DISPATCHER
Parameter:
Functional.Detection#DETECTION_AREAS.DetectedItem DetectedItem
Return values:
Evaluates the removal of the Task from the Mission.
Can only occur when the DetectedItem is Changed AND the state of the Task is "Planned".
Defined in:
TASK_A2G_DISPATCHER
Parameters:
Tasking.Mission#MISSION Mission
Tasking.Task#TASK Task
#boolean DetectedItemID
#boolean DetectedItemChange
TaskIndex
DetectedItemChanged
Return value:
Creates a SEAD task when there are targets for it.
Defined in:
TASK_A2G_DISPATCHER
Parameter:
Functional.Detection#DETECTION_AREAS.DetectedItem DetectedItem
Return values:
TASK_A2G_DISPATCHER constructor.
Defined in:
TASK_A2G_DISPATCHER
Parameters:
Tasking.Mission#MISSION Mission
The mission for which the task dispatching is done.
Core.Set#SET_GROUP SetGroup
The set of groups that can join the tasks within the mission.
Functional.Detection#DETECTION_BASE Detection
The detection results that are used to dynamically assign new tasks to human players.
Return value:
self
OnAfter Transition Handler for Event Assign.
Defined in:
TASK_A2G_DISPATCHER
Parameters:
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
Wrapper.Unit#UNIT TaskUnit
#string PlayerName
Assigns tasks in relation to the detected items to the Core.Set#SET_GROUP.
Defined in:
TASK_A2G_DISPATCHER
Parameter:
Functional.Detection#DETECTION_BASE Detection
The detection created by the Functional.Detection#DETECTION_BASE derived object.
Return value:
#boolean:
Return true if you want the task assigning to continue... false will cancel the loop.
Defined in:
TASK_A2G_DISPATCHER
Parameter:
TaskIndex
Set flashing player messages on or off
Defined in:
TASK_A2G_DISPATCHER
Parameter:
#boolean onoff
Set messages on (true) or off (false)
Field(s)
The DETECTION_BASE object that is used to report the detected objects.
Function(s)
Get the command center to communicate actions to the players.
Defined in:
Return value:
The command center.
Get the reporting message display time.
Defined in:
Return value:
#number:
ReportDisplayTime The display time in seconds when a report needs to be done.
Send an information message to the players reporting to the command center.
Defined in:
Parameters:
#table Squadron
The squadron table.
#string Message
The message to be sent.
#string SoundFile
The name of the sound file .wav or .ogg.
#number SoundDuration
The duration of the sound.
#string SoundPath
The path pointing to the folder in the mission file.
Wrapper.Group#GROUP DefenderGroup
The defender group sending the message.
Return value:
self
FAC constructor.
Defined in:
Parameters:
Core.Set#SET_GROUP SetGroup
Functional.Detection#DETECTION_BASE Detection
Return value:
self
Aborted Handler OnAfter for DETECTION_MANAGER
Cancelled Handler OnAfter for DETECTION_MANAGER
Failed Handler OnAfter for DETECTION_MANAGER
Start Handler OnAfter for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Stop Handler OnAfter for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Success Handler OnAfter for DETECTION_MANAGER
Start Handler OnBefore for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Return value:
#boolean:
Stop Handler OnBefore for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Return value:
#boolean:
Reports the detected items to the Core.Set#SET_GROUP.
Set a command center to communicate actions to the players reporting to the command center.
Defined in:
Parameter:
Tasking.CommandCenter#COMMANDCENTER CommandCenter
The command center.
Return value:
self
Set the reporting time interval.
Defined in:
Parameter:
#number RefreshTimeInterval
The interval in seconds when a report needs to be done.
Return value:
self
Set the reporting message display time.
Defined in:
Parameter:
#number ReportDisplayTime
The display time in seconds when a report needs to be done.
Return value:
self
Set a command center to communicate actions to the players reporting to the command center.
Defined in:
Parameters:
DispatcherMainMenuText
DispatcherMenuText
Return value:
self
Start Trigger for DETECTION_MANAGER
Defined in:
Stop Trigger for DETECTION_MANAGER
Defined in:
Start Asynchronous Trigger for DETECTION_MANAGER
Stop Asynchronous Trigger for DETECTION_MANAGER