Module Tasking.Task_A2A_Dispatcher
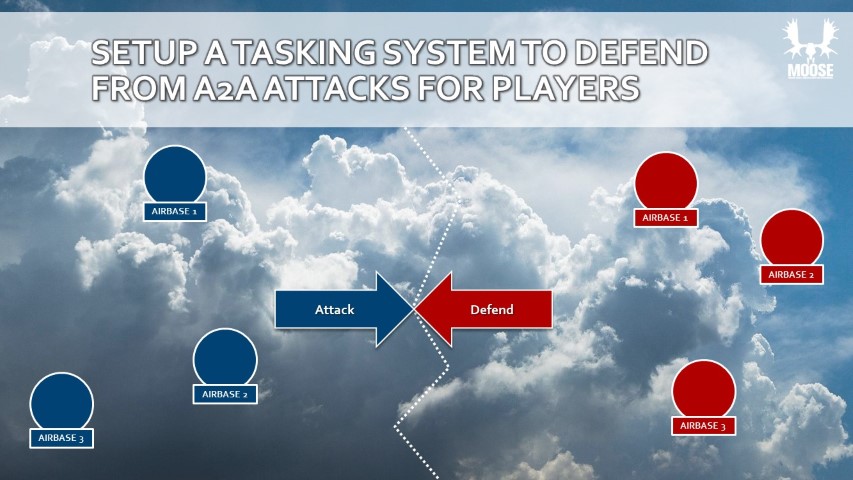
Tasking - Dynamically allocates A2A tasks to human players, based on detected airborne targets through an EWR network.
Features:
- Dynamically assign tasks to human players based on detected targets.
- Dynamically change the tasks as the tactical situation evolves during the mission.
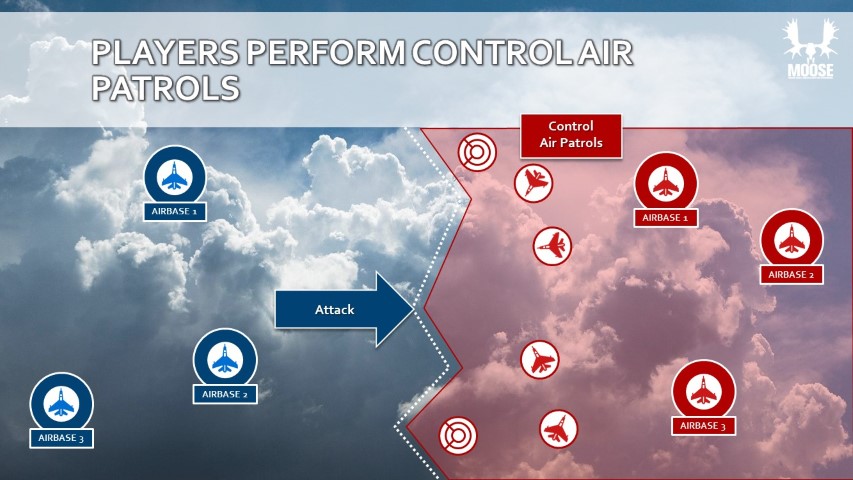
- Dynamically assign (CAP) Control Air Patrols tasks for human players to perform CAP.
- Dynamically assign (GCI) Ground Control Intercept tasks for human players to perform GCI.
- Dynamically assign Engage tasks for human players to engage on close-by airborne bogeys.
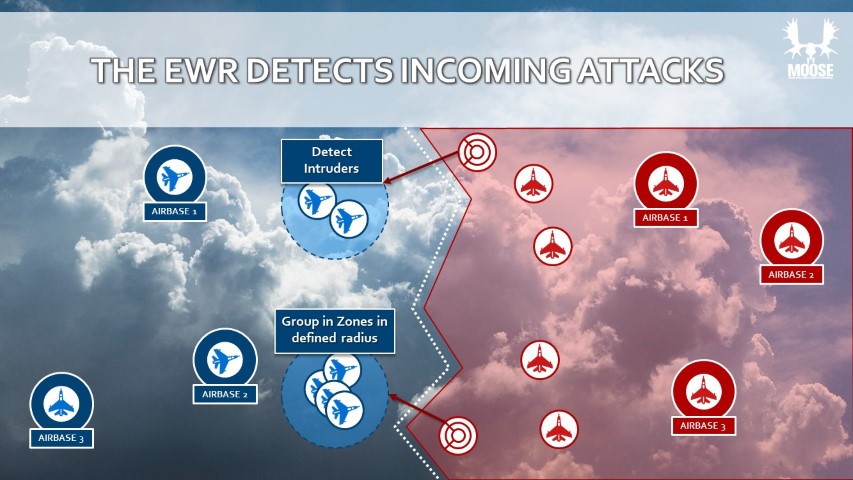
- Define and use an EWR (Early Warning Radar) network.
- Define different ranges to engage upon intruders.
- Keep task achievements.
- Score task achievements.
Author: FlightControl
Contributions:
Global(s)
Global TASK_A2A_DISPATCHER |
Orchestrates the dynamic dispatching of tasks upon groups of detected units determined a Core.Set of EWR installation groups. |
Orchestrates the dynamic dispatching of tasks upon groups of detected units determined a Core.Set of EWR installation groups.

The EWR will detect units, will group them, and will dispatch Tasking.Tasks to groups. Depending on the type of target detected, different tasks will be dispatched. Find a summary below describing for which situation a task type is created:
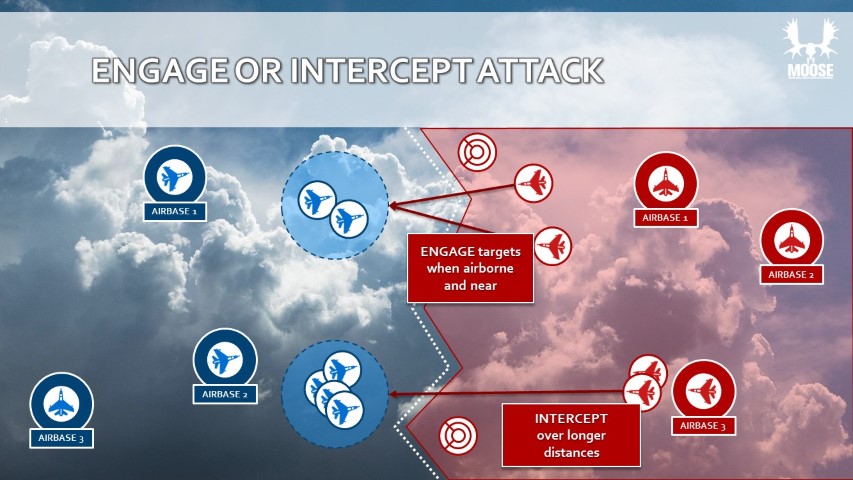
- INTERCEPT Task: Is created when the target is known, is detected and within a danger zone, and there is no friendly airborne in range.
- SWEEP Task: Is created when the target is unknown, was detected and the last position is only known, and within a danger zone, and there is no friendly airborne in range.
- ENGAGE Task: Is created when the target is known, is detected and within a danger zone, and there is a friendly airborne in range, that will receive this task.
1. TASK_A2A_DISPATCHER constructor:
The TASK_A2A_DISPATCHER.New() method creates a new TASK_A2A_DISPATCHER instance.
1.1. Define or set the Mission:
Tasking is executed to accomplish missions. Therefore, a MISSION object needs to be given as the first parameter.
local HQ = GROUP:FindByName( "HQ", "Bravo" )
local CommandCenter = COMMANDCENTER:New( HQ, "Lima" )
local Mission = MISSION:New( CommandCenter, "A2A Mission", "High", "Watch the air enemy units being detected.", coalition.side.RED )
Missions are governed by COMMANDCENTERS, so, ensure you have a COMMANDCENTER object installed and setup within your mission. Create the MISSION object, and hook it under the command center.
1.2. Build a set of the groups seated by human players:

A set or collection of the groups wherein human players can be seated, these can be clients or units that can be joined as a slot or jumping into.
local AttackGroups = SET_GROUP:New():FilterCoalitions( "red" ):FilterPrefixes( "Defender" ):FilterStart()
The set is built using the SET_GROUP class. Apply any filter criteria to identify the correct groups for your mission. Only these slots or units will be able to execute the mission and will receive tasks for this mission, once available.
1.3. Define the EWR network:
As part of the TASK_A2A_DISPATCHER constructor, an EWR network must be given as the third parameter. An EWR network, or, Early Warning Radar network, is used to early detect potential airborne targets and to understand the position of patrolling targets of the enemy.
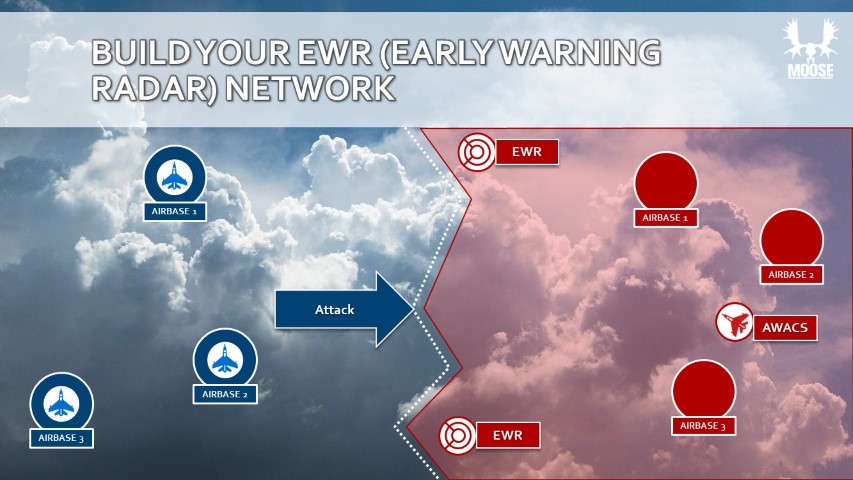
Typically EWR networks are setup using 55G6 EWR, 1L13 EWR, Hawk sr and Patriot str ground based radar units. These radars have different ranges and 55G6 EWR and 1L13 EWR radars are Eastern Bloc units (eg Russia, Ukraine, Georgia) while the Hawk and Patriot radars are Western (eg US). Additionally, ANY other radar capable unit can be part of the EWR network! Also AWACS airborne units, planes, helicopters can help to detect targets, as long as they have radar. The position of these units is very important as they need to provide enough coverage to pick up enemy aircraft as they approach so that CAP and GCI flights can be tasked to intercept them.
Additionally in a hot war situation where the border is no longer respected the placement of radars has a big effect on how fast the war escalates. For example if they are a long way forward and can detect enemy planes on the ground and taking off they will start to vector CAP and GCI flights to attack them straight away which will immediately draw a response from the other coalition. Having the radars further back will mean a slower escalation because fewer targets will be detected and therefore less CAP and GCI flights will spawn and this will tend to make just the border area active rather than a melee over the whole map. It all depends on what the desired effect is.
EWR networks are dynamically constructed, that is, they form part of the Functional.Detection#DETECTION_BASE object that is given as the input parameter of the TASK_A2A_DISPATCHER class. By defining in a smart way the names or name prefixes of the groups with EWR capable units, these groups will be automatically added or deleted from the EWR network, increasing or decreasing the radar coverage of the Early Warning System.
See the following example to setup an EWR network containing EWR stations and AWACS.
local EWRSet = SET_GROUP:New():FilterPrefixes( "EWR" ):FilterCoalitions("red"):FilterStart()
local EWRDetection = DETECTION_AREAS:New( EWRSet, 6000 )
EWRDetection:SetFriendliesRange( 10000 )
EWRDetection:SetRefreshTimeInterval(30)
-- Setup the A2A dispatcher, and initialize it.
A2ADispatcher = TASK_A2A_DISPATCHER:New( Mission, AttackGroups, EWRDetection )
The above example creates a SET_GROUP instance, and stores this in the variable (object) EWRSet. EWRSet is then being configured to filter all active groups with a group name starting with EWR to be included in the Set. EWRSet is then being ordered to start the dynamic filtering. Note that any destroy or new spawn of a group with the above names will be removed or added to the Set. Then a new EWRDetection object is created from the class DETECTION_AREAS. A grouping radius of 6000 is chosen, which is 6 km. The EWRDetection object is then passed to the TASK_A2A_DISPATCHER.New() method to indicate the EWR network configuration and setup the A2A tasking and detection mechanism.
2. Define the detected target grouping radius:
The target grouping radius is a property of the Detection object, that was passed to the AI_A2A_DISPATCHER object, but can be changed. The grouping radius should not be too small, but also depends on the types of planes and the era of the simulation. Fast planes like in the 80s, need a larger radius than WWII planes. Typically I suggest to use 30000 for new generation planes and 10000 for older era aircraft.
Note that detected targets are constantly re-grouped, that is, when certain detected aircraft are moving further than the group radius, then these aircraft will become a separate group being detected. This may result in additional GCI being started by the dispatcher! So don't make this value too small!
3. Set the Engage radius:
Define the radius to engage any target by airborne friendlies, which are executing cap or returning from an intercept mission.
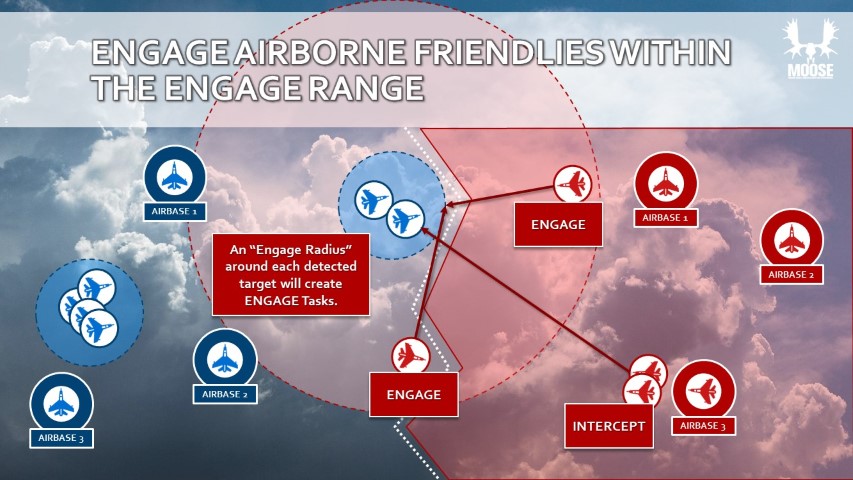
So, if there is a target area detected and reported, then any friendlies that are airborne near this target area, will be commanded to (re-)engage that target when available (if no other tasks were commanded). For example, if 100000 is given as a value, then any friendly that is airborne within 100km from the detected target, will be considered to receive the command to engage that target area. You need to evaluate the value of this parameter carefully. If too small, more intercept missions may be triggered upon detected target areas. If too large, any airborne cap may not be able to reach the detected target area in time, because it is too far.
4. Set Scoring and Messages:
The TASK_A2A_DISPATCHER is a state machine. It triggers the event Assign when a new player joins a Tasking.Task dispatched by the TASK_A2A_DISPATCHER. An event handler can be defined to catch the Assign event, and add additional processing to set scoring and to define messages, when the player reaches certain achievements in the task.
The prototype to handle the Assign event needs to be developed as follows:
TaskDispatcher = TASK_A2A_DISPATCHER:New( ... )
-- @param #TaskDispatcher self
-- @param #string From Contains the name of the state from where the Event was triggered.
-- @param #string Event Contains the name of the event that was triggered. In this case Assign.
-- @param #string To Contains the name of the state that will be transitioned to.
-- @param Tasking.Task_A2A#TASK_A2A Task The Task object, which is any derived object from TASK_A2A.
-- @param Wrapper.Unit#UNIT TaskUnit The Unit or Client that contains the Player.
-- @param #string PlayerName The name of the Player that joined the TaskUnit.
function TaskDispatcher:OnAfterAssign( From, Event, To, Task, TaskUnit, PlayerName )
Task:SetScoreOnProgress( PlayerName, 20, TaskUnit )
Task:SetScoreOnSuccess( PlayerName, 200, TaskUnit )
Task:SetScoreOnFail( PlayerName, -100, TaskUnit )
end
The OnAfterAssign method (function) is added to the TaskDispatcher object. This method will be called when a new player joins a unit in the set of groups in scope of the dispatcher. So, this method will be called only ONCE when a player joins a unit in scope of the task.
The TASK class implements various methods to additional set scoring for player achievements:
Tasking.Task#TASK.SetScoreOnProgress() will add additional scores when a player achieves Progress while executing the task. Examples of task progress can be destroying units, arriving at zones etc.
Tasking.Task#TASK.SetScoreOnSuccess() will add additional scores when the task goes into Success state. This means the task has been successfully completed.
Tasking.Task#TASK.SetScoreOnSuccess() will add additional (negative) scores when the task goes into Failed state. This means the task has not been successfully completed, and the scores must be given with a negative value!
Developer Note
Note while this class still works, it is no longer supported as the original author stopped active development of MOOSE Therefore, this class is considered to be deprecated
Type(s)
| Fields and Methods inherited from TASK_A2A_DISPATCHER | Description |
|---|---|
|
Creates an ENGAGE task when there are human friendlies airborne near the targets. |
|
|
Creates an INTERCEPT task when there are targets for it. |
|
|
Evaluates the removal of the Task from the Mission. |
|
|
Creates an SWEEP task when there are targets for it. |
|
|
Calculates which friendlies are nearby the area |
|
|
Calculates which HUMAN friendlies are nearby the area |
|
|
TASK_A2A_DISPATCHER constructor. |
|
TASK_A2A_DISPATCHER:OnAfterAssign(From, Event, To, Task, TaskUnit, PlayerName) |
OnAfter Transition Handler for Event Assign. |
|
Assigns tasks in relation to the detected items to the Core.Set#SET_GROUP. |
|
|
Define the radius to when an ENGAGE task will be generated for any nearby by airborne friendlies, which are executing cap or returning from an intercept mission. |
|
|
Set flashing player messages on or off |
| Fields and Methods inherited from DETECTION_MANAGER | Description |
|---|---|
|
Get the command center to communicate actions to the players. |
|
|
Get the reporting message display time. |
|
|
Send an information message to the players reporting to the command center. |
|
|
FAC constructor. |
|
|
Aborted Handler OnAfter for DETECTION_MANAGER |
|
|
Cancelled Handler OnAfter for DETECTION_MANAGER |
|
|
Failed Handler OnAfter for DETECTION_MANAGER |
|
|
Start Handler OnAfter for DETECTION_MANAGER |
|
|
Stop Handler OnAfter for DETECTION_MANAGER |
|
|
Success Handler OnAfter for DETECTION_MANAGER |
|
|
Start Handler OnBefore for DETECTION_MANAGER |
|
|
Stop Handler OnBefore for DETECTION_MANAGER |
|
|
Reports the detected items to the Core.Set#SET_GROUP. |
|
|
Set a command center to communicate actions to the players reporting to the command center. |
|
TASK_A2A_DISPATCHER:SetRefreshTimeInterval(RefreshTimeInterval) |
Set the reporting time interval. |
|
Set the reporting message display time. |
|
TASK_A2A_DISPATCHER:SetTacticalMenu(DispatcherMainMenuText, DispatcherMenuText) |
Set a command center to communicate actions to the players reporting to the command center. |
|
Start Trigger for DETECTION_MANAGER |
|
|
Stop Trigger for DETECTION_MANAGER |
|
|
Start Asynchronous Trigger for DETECTION_MANAGER |
|
|
Stop Asynchronous Trigger for DETECTION_MANAGER |
|
TASK_A2A_DISPATCHER class.
Field(s)
Function(s)
Creates an ENGAGE task when there are human friendlies airborne near the targets.
Defined in:
TASK_A2A_DISPATCHER
Parameter:
Functional.Detection#DETECTION_BASE.DetectedItem DetectedItem
Return values:
Creates an INTERCEPT task when there are targets for it.
Defined in:
TASK_A2A_DISPATCHER
Parameter:
Functional.Detection#DETECTION_BASE.DetectedItem DetectedItem
Return values:
Evaluates the removal of the Task from the Mission.
Can only occur when the DetectedItem is Changed AND the state of the Task is "Planned".
Defined in:
TASK_A2A_DISPATCHER
Parameters:
Tasking.Mission#MISSION Mission
Tasking.Task#TASK Task
Functional.Detection#DETECTION_BASE Detection
The detection created by the Functional.Detection#DETECTION_BASE derived object.
#boolean DetectedItemID
#boolean DetectedItemChange
DetectedItem
DetectedItemIndex
DetectedItemChanged
Return value:
Creates an SWEEP task when there are targets for it.
Defined in:
TASK_A2A_DISPATCHER
Parameter:
Functional.Detection#DETECTION_BASE.DetectedItem DetectedItem
Return values:
Calculates which friendlies are nearby the area
Defined in:
TASK_A2A_DISPATCHER
Parameter:
DetectedItem
Return value:
#number, Tasking.CommandCenter#REPORT:
Calculates which HUMAN friendlies are nearby the area
Defined in:
TASK_A2A_DISPATCHER
Parameter:
DetectedItem
Return value:
#number, Tasking.CommandCenter#REPORT:
TASK_A2A_DISPATCHER constructor.
Defined in:
TASK_A2A_DISPATCHER
Parameters:
Tasking.Mission#MISSION Mission
The mission for which the task dispatching is done.
Core.Set#SET_GROUP SetGroup
The set of groups that can join the tasks within the mission.
Functional.Detection#DETECTION_BASE Detection
The detection results that are used to dynamically assign new tasks to human players.
Return value:
self
OnAfter Transition Handler for Event Assign.
Defined in:
TASK_A2A_DISPATCHER
Parameters:
#string From
The From State string.
#string Event
The Event string.
#string To
The To State string.
Wrapper.Unit#UNIT TaskUnit
#string PlayerName
Assigns tasks in relation to the detected items to the Core.Set#SET_GROUP.
Defined in:
TASK_A2A_DISPATCHER
Parameter:
Functional.Detection#DETECTION_BASE Detection
The detection created by the Functional.Detection#DETECTION_BASE derived object.
Return value:
#boolean:
Return true if you want the task assigning to continue... false will cancel the loop.
Defined in:
TASK_A2A_DISPATCHER
Parameter:
TaskIndex
Define the radius to when an ENGAGE task will be generated for any nearby by airborne friendlies, which are executing cap or returning from an intercept mission.
So, if there is a target area detected and reported, then any friendlies that are airborne near this target area, will be commanded to (re-)engage that target when available (if no other tasks were commanded). An ENGAGE task will be created for those pilots. For example, if 100000 is given as a value, then any friendly that is airborne within 100km from the detected target, will be considered to receive the command to engage that target area. You need to evaluate the value of this parameter carefully. If too small, more intercept missions may be triggered upon detected target areas. If too large, any airborne cap may not be able to reach the detected target area in time, because it is too far.
Defined in:
TASK_A2A_DISPATCHER
Parameter:
#number EngageRadius
(Optional, Default = 100000) The radius to report friendlies near the target.
Return value:
Usage:
-- Set 50km as the radius to engage any target by airborne friendlies.
TaskA2ADispatcher:SetEngageRadius( 50000 )
-- Set 100km as the radius to engage any target by airborne friendlies.
TaskA2ADispatcher:SetEngageRadius() -- 100000 is the default value.
Set flashing player messages on or off
Defined in:
TASK_A2A_DISPATCHER
Parameter:
#boolean onoff
Set messages on (true) or off (false)
Field(s)
Function(s)
Get the command center to communicate actions to the players.
Defined in:
Return value:
The command center.
Get the reporting message display time.
Defined in:
Return value:
#number:
ReportDisplayTime The display time in seconds when a report needs to be done.
Send an information message to the players reporting to the command center.
Defined in:
Parameters:
#table Squadron
The squadron table.
#string Message
The message to be sent.
#string SoundFile
The name of the sound file .wav or .ogg.
#number SoundDuration
The duration of the sound.
#string SoundPath
The path pointing to the folder in the mission file.
Wrapper.Group#GROUP DefenderGroup
The defender group sending the message.
Return value:
self
FAC constructor.
Defined in:
Parameters:
Core.Set#SET_GROUP SetGroup
Functional.Detection#DETECTION_BASE Detection
Return value:
self
Aborted Handler OnAfter for DETECTION_MANAGER
Cancelled Handler OnAfter for DETECTION_MANAGER
Failed Handler OnAfter for DETECTION_MANAGER
Start Handler OnAfter for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Stop Handler OnAfter for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Success Handler OnAfter for DETECTION_MANAGER
Start Handler OnBefore for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Return value:
#boolean:
Stop Handler OnBefore for DETECTION_MANAGER
Defined in:
Parameters:
#string From
#string Event
#string To
Return value:
#boolean:
Reports the detected items to the Core.Set#SET_GROUP.
Set a command center to communicate actions to the players reporting to the command center.
Defined in:
Parameter:
Tasking.CommandCenter#COMMANDCENTER CommandCenter
The command center.
Return value:
self
Set the reporting time interval.
Defined in:
Parameter:
#number RefreshTimeInterval
The interval in seconds when a report needs to be done.
Return value:
self
Set the reporting message display time.
Defined in:
Parameter:
#number ReportDisplayTime
The display time in seconds when a report needs to be done.
Return value:
self
Set a command center to communicate actions to the players reporting to the command center.
Defined in:
Parameters:
DispatcherMainMenuText
DispatcherMenuText
Return value:
self
Start Trigger for DETECTION_MANAGER
Defined in:
Stop Trigger for DETECTION_MANAGER
Defined in:
Start Asynchronous Trigger for DETECTION_MANAGER
Stop Asynchronous Trigger for DETECTION_MANAGER